Windows环境下编译PCL
PCL对VS和第三方库的版本依赖关系较高,所以对于不同VS版本需要对PCL和第三方库分别编译和安装。按照本文一步步进行编译,即可成功安装PCL。需要注意的是,下文中的绝对路径可以根据自己的需要进行调整。
以下步骤如有错误或不妥,欢迎留言交流,以进一步优化编译和安装过程。
一. 安装CMake
进入CMake官网,根据自己的电脑配置选择对应的安装包,下载并进行安装。
二. 依赖库的编译和安装
| 第三方库 | 用途 | 是否必须 |
|---|---|---|
| Boost | 用于智能指针等操作 | 必选 |
| Eigen | 用于矩阵运算等 | 必选 |
| FLANN | 用于邻域搜索等 | 必选 |
| VTK | 可视化库,用于显示点云等 | 必须 |
| QHULL | 一个强大的计算几何库,可以用于计算高维的convex hull,Delaunay triangulation,Voronoi diiagram等 | 必选 |
| Qt | 用于图像交互界面等 | 可选 |
| OpenNI | 用于获取点云等 | 可选 |
在编译PCL前须确保已正确安装了第三方依赖库,不能混用32为和64位的代码,不能混用不同编译器编译的第三方库。
a. Boost
下载地址:https://www.boost.org/users/download/
进入boost文件夹,运行bootstrap.bat,运行结束后会生成project-config.jam。
使用命令编译boost
1
b2.exe install toolset=msvc-14.3 address-model=64 --without-python --build-dir=build --prefix="C:\MyPrograms\PCL\Boost"
b. Eigen
下载地址:https://gitlab.com/libeigen/eigen
打开CMake,分别设置Eigen的source和build路径。
点击按钮
Configure。配置:Name Value CMAKE_INSTALL_PREFIX C:\MyPrograms\PCL\Eigen3 再次点击按钮
Configure。点击按钮
Generate。点击按钮
Open Project。找到菜单Build->Batch build...,勾选ALL_BUILD(Debug)和ALL_BUILD(Release),点击Build按钮。再勾选INSTALL(Debug)和INSTALL(Release),点击Build按钮。
c. FLANN
下载地址:https://github.com/flann-lib/flann
打开CMake,分别设置FLANN的source和build路径。
点击按钮
Configure。配置:Name Value BUILD_C_BINDINGS check BUILD_MATLAB_BINDINGS uncheck BUILD_PYTHON_BINDINGS uncheck CMAKE_CONFIGURATION_TYPES Debug;Release CMAKE_INSTALL_PREFIX C:\MyPrograms\PCL\flann 添加Entry:
Name Type Value CMAKE_DEBUG_POSTFIX STRING -gd 再次点击按钮
Configure。点击按钮
Generate。点击按钮
Open Project。找到菜单Build->Batch build...,勾选ALL_BUILD(Debug)和ALL_BUILD(Release),点击Build按钮。再勾选INSTALL(Debug)和INSTALL(Release),点击Build按钮。
d. QHull
下载地址:https://github.com/qhull/qhull
打开CMake,分别设置QHull的source和build路径。
点击按钮
Configure。配置:Name Value CMAKE_INSTALL_PREFIX C:\MyPrograms\PCL\qhull 再次点击按钮
Configure。点击按钮
Generate。点击按钮
Open Project。找到菜单Build->Batch build...,勾选ALL_BUILD(Debug)和ALL_BUILD(Release),点击Build按钮。再勾选INSTALL(Debug)和INSTALL(Release),点击Build按钮。
e. VTK
下载地址:https://vtk.org/download/
打开CMake,分别设置VTK的source和build路径。
点击按钮
Configure。配置:Name Value CMAKE_INSTALL_PREFIX C:\MyPrograms\PCL\VTK BUILD_SHARED_LIBS uncheck CMAKE_CXX_MP_FLAG check VTK_RENDERING_BACKEND OpenGL2 添加Entry:
Name Type Value CMAKE_DEBUG_POSTFIX STRING -d 如果需要对Qt的支持,则需要首先安装Qt(点击下载),然后继续配置:
Name Value Qt5_DIR C:\MyPrograms\Qt\Qt5.13.1\5.13.1\msvc2017_64\lib\cmake\Qt5 VTK_QT_VERSION 5 再次点击按钮
Configure。点击按钮
Generate。点击按钮
Open Project。找到菜单Build->Batch build...,勾选ALL_BUILD(Debug)和ALL_BUILD(Release),点击Build按钮。再勾选INSTALL(Debug)和INSTALL(Release),点击Build按钮。
三. 编译PCL
下载地址:https://github.com/PointCloudLibrary/pcl/releases
打开CMake,分别设置PCL的source和build路径。
点击按钮
Configure。配置:
| Name | Value |
|---|---|
| EIGEN_INCLUDE_DIR | C:\MyPrograms\PCL\Eigen3\include\eigen3 |
| FLANN_INCLUDE_DIR | C:\MyPrograms\PCL\flann\include |
| FLANN_LIBRARY | C:\MyPrograms\PCL\flann\lib\flann_cpp_s.lib |
| FLANN_LIBRARY_DEBUG | C:\MyPrograms\PCL\flann\lib\flann_cpp_s-gd.lib |
| FLANN_LIBRARY_SHARED | C:\MyPrograms\PCL\flann\lib\flann_cpp_s.lib |
| Boost_INCLUDE_DIR | C:\MyPrograms\PCL\Boost\include\boost-1_78 |
| Boost_LIBRARY_DIR_DEBUG | C:\MyPrograms\PCL\Boost\lib |
| Boost_LIBRARY_DIR_RELEASE | C:\MyPrograms\PCL\Boost\lib |
| VTK_DIR | C:\MyPrograms\PCL\VTK\lib\cmake\vtk-9.1 |
| QHULL_LIBRARY | C:\MyPrograms\PCL\qhull\lib\qhullcpp.lib |
| QHULL_LIBRARY_DEBUG | C:\MyPrograms\PCL\qhull\lib\qhullcpp_d-d.lib |
| CMAKE_INSTALL_PREFIX | C:\MyPrograms\PCL\PCL |
| WITH_CUDA | false |
再次点击按钮
Configure。点击按钮
Generate。点击按钮
Open Project。找到菜单Build->Batch build...,勾选ALL_BUILD(Debug)和ALL_BUILD(Release),点击Build按钮。再勾选INSTALL(Debug)和INSTALL(Release),点击Build按钮。
如果使用VS构建时报错,找到报错的项目,逐个解决。举例如下:
- 无法打开头文件,如下图所示。
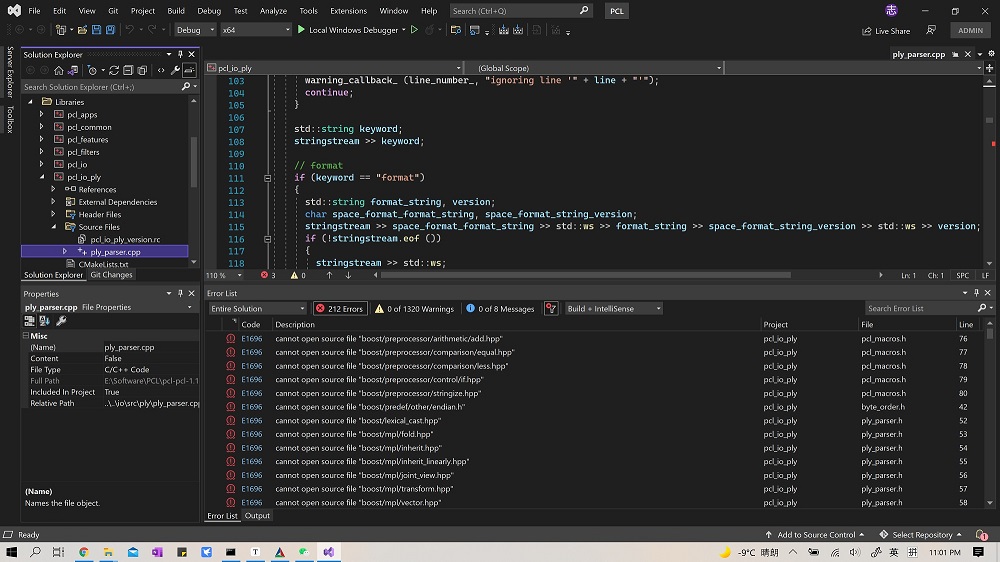
解决方法:在项目浏览器中右键点击出错项目pcl_io_ply,在Configuration Properties->C/C++->Additional Include Directories项中增加Boost的头文件目录,如C:\MyPrograms\PCL\Boost\include\boost-1_78。注意Debug和Release的配置都要做相应修改。然后右键项目pcl_io_ply进行Build即可。
- lib库文件出错,如下图所示。
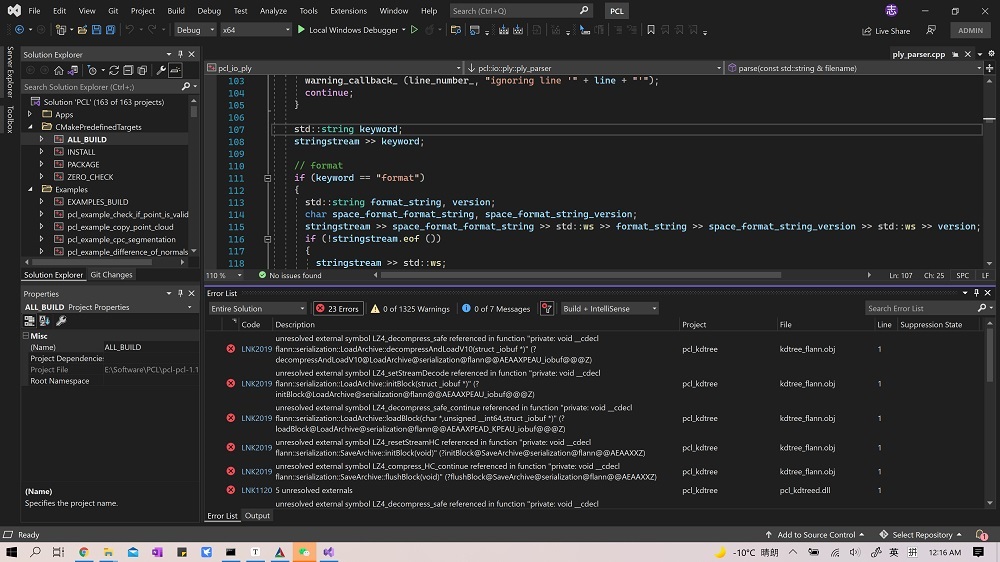
解决方法:在项目浏览器中右键点击出错项目pcl_kdtree,在Configuration Properties->Linker->Input->Additional Dependencies项中增加flann相关的lib文件。对于Debug配置增加C:\MyPrograms\PCL\flann\lib\flann_cpp_s-gd.lib,对于Release配置增加C:\MyPrograms\PCL\flann\lib\flann_cpp_s.lib。然后右键项目pcl_kdtree进行Build即可。
四. 测试和使用PCL
新建一个空项目,新建test.cpp,并粘贴以下代码。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
int user_data;
void
viewerOneOff(pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor(1.0, 0.5, 1.0);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere(o, 0.25, "sphere", 0);
std::cout << "i only run once" << std::endl;
}
void
viewerPsycho(pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape("text", 0);
viewer.addText(ss.str(), 200, 300, "text", 0);
//FIXME: possible race condition here:
user_data++;
}
int
main()
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile("my_point_cloud.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//blocks until the cloud is actually rendered
viewer.showCloud(cloud);
//use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer
//This will only get called once
viewer.runOnVisualizationThreadOnce(viewerOneOff);
//This will get called once per visualization iteration
viewer.runOnVisualizationThread(viewerPsycho);
while (!viewer.wasStopped())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
}配置项目属性页,Debug和Release要分别配置:
Configuration Properties->Debugging->Environment加入各个库的bin文件夹,生成方式见此节(debuggingEnvironments.txt),例如PATH=%(PATH);C:\MyPrograms\PCL\PCL\bin;C:\MyPrograms\PCL\flann\bin;C:\MyPrograms\PCL\qhull\bin;C:\MyPrograms\PCL\VTK\binConfiguration Properties->VC++ Directories->Include Directories加入各个库的头文件所在的文件夹,生成方式见此节(includeDirs.txt),例如C:\MyPrograms\PCL\PCL\lib;C:\MyPrograms\PCL\Boost\lib;C:\MyPrograms\PCL\flann\lib;C:\MyPrograms\PCL\qhull\lib;C:\MyPrograms\PCL\VTK\lib;$(LibraryPath)Configuration Properties->VC++ Directories->Library Directories加入各个库的lib所在的文件夹,生成方式见此节(libDirs.txt),例如C:\MyPrograms\PCL\PCL\lib;C:\MyPrograms\PCL\Boost\lib;C:\MyPrograms\PCL\flann\lib;C:\MyPrograms\PCL\qhull\lib;C:\MyPrograms\PCL\VTK\lib;$(LibraryPath)Configuration Properties->Linker->Input->Additional Dependencies加入分别与Debug和Release相对的lib文件名,生成方式见此节(libsDebugAll.txt和libsReleaseAll.txt),例如Debug的pcl_appsd.lib;pcl_commond.lib;...或Release的pcl_apps.lib;pcl_common.lib;...
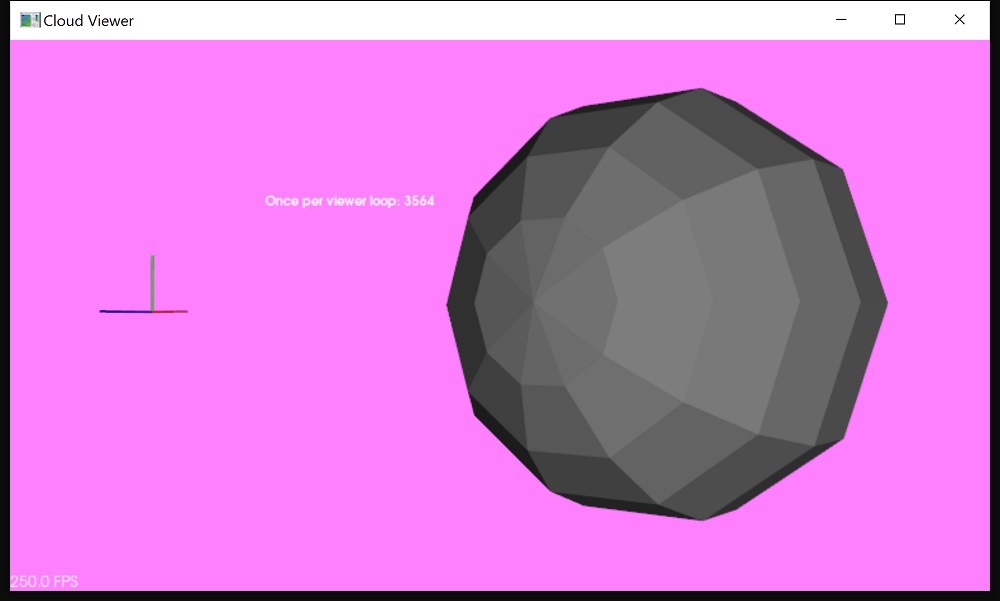
编译并运行此项目,如果可以显示如下可视化结果,即表明PCL成功安装。
五. 生成所需路径和lib文件
使用getPCLLibs.py脚本可以完成对所有所需路径和lib文件的提取。注意保证脚本中的路径正确:pclRoot,BoostRoot,EigenRoot,flannRoot,qhullRoot,VTKRoot。
1 | #!/usr/bin/env python |
项目属性页和生成结果的对应关系如下:
| 项目属性页 | 生成结果 |
|---|---|
| Debugging -> Environment | debuggingEnvironments.txt |
| Include Directories | includeDirs.txt |
| Library Directories | libDirs.txt |
| Additional Dependencies (Debug) | libsDebugAll.txt |
| Additional Dependencies (Release) | libsReleaseAll.txt |
六. 参考
- Building PCL’s dependencies from source on Windows
- Compiling PCL from source on Windows
- Using PCL in your own project
- Point Cloud Library
- 第二章 PCL基础(下篇)
微信公众号






